
[Deep Learning: 신경망의 기초]다층퍼셉트론
다층 퍼셉트론
- 퍼셉트론 : 선형 분류기의 한계
- 선형 분리 불가능한 상황에서 일정한 양의 오류
- 예) XOR 문제에서 75% 정확도 한계
- 다층 퍼셉트론의 핵심 아이디어
- 은닉층을 둔다. 은닉층은 원래 특징 공간을 분류하는데 훨씬 유리한 새로운 특징 공간으로 변환한다.
- 시그모이드 활성함수를 도입한다. 연성에서는 출력이 연속값인데, 출력을 신뢰도로 간주함으로써 더 융통성 있게 의사결정을 할 수 있다. 0 아니면 1로 출력되는 계단함수가 아니라!
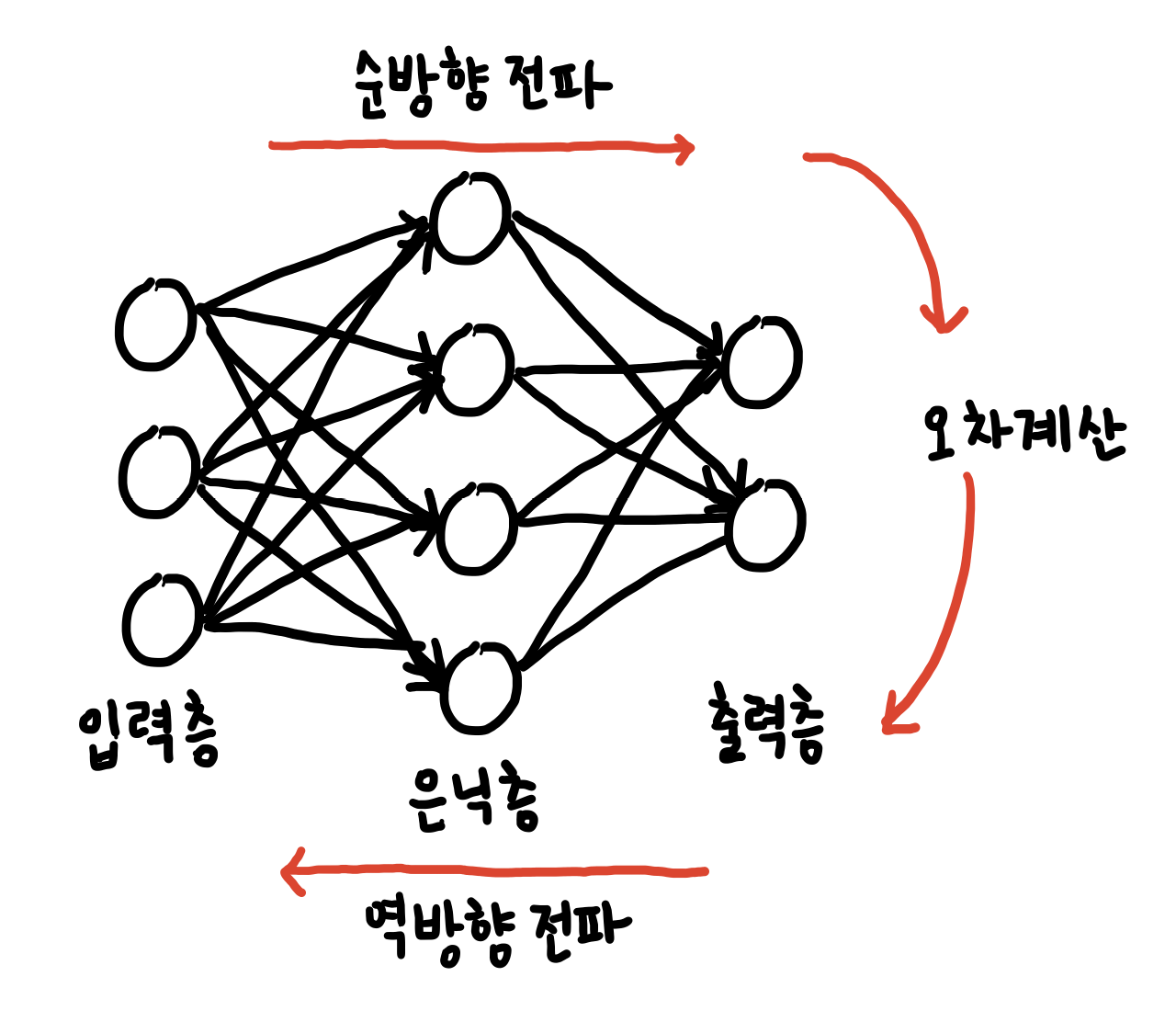
- 오류 역전파 알고리즘을 사용한다. 역방향으로 진행하면서 한번에 한 층씩 그레디언트를 게산하고 가중치를 갱신한다.
특징 공간 변환
- 퍼셉트론 2개를 사용한 XOR 문제의 해결
- XOR은 AND + OR이다. 이처럼 퍼셉트론 여러개의 조합을 통해 문제를 풀 수 있다. 즉 퍼셉트론을 여러개 사용한다.
- 퍼셉트론 2개를 병렬 결합하면,
- 원래 공간 x을 새로운 특징공간 z으로 변환 -> 새로운 특징 공간 z에서 선형 분리 가능함
- 퍼셉트론들의 조합에 의해 공간이 새롭게 바뀐다. 아무리 복잡하게 있는 공간이더라도 그 의미가 두드러지게끔 퍼셉트론의 선형, 비선형 요소를 사용해서 병렬적으로 배치한 은닉층을 통해 문제를 풀기 위한 유리한 공간으로 바꿀 수 있다.
- 추가 퍼셉트론 1개를 순차 결합하면,
- 새로운 특징 공간 z과 선형 분리를 수행하는 퍼셉트론을 순차 결합하면, 다층 퍼셉트론이 됨
- 해당 다층 퍼셉트론은 XOR 훈련집합에 있는 4개의 샘플을 제대로 분류한다.(0,0)(0,1)(1,0)(1,1) 이것은 단일 퍼셉트론으로는 xy좌표 4사분면 안에서 직선 하나로 구분할 수 없다!
-
원공간이 갖고있던 복잡성을 심플하게 만들고 주어져있는 정보의 손실이 없게끔 한다. 퍼셉트론이 가진 선형/비선형적인 연산에 의해 얻어질 수 있고, 그것들의 병렬배치를 통해 이뤄질 수 있다.
- 다층 퍼셉트론의 용량
- 3개의 퍼셉트론을 결합한 경우
- 2차원 공간을 7개 영역으로 나누고 각 영역을 3차원 점으로 변환
- 계단함수를 활성함수 $\tau$로 사용을 가정하였으므로 영역을 점으로 변환
- 일반화하여, p개 퍼셉트론을 결합하면 p차원 공간으로 변환
- 3개의 퍼셉트론을 결합한 경우
활성함수
- 딱딱한 공간 분할과 부드러운 공간 분할
- 계단함수는 딱딱한 의사결정(1 아니면 -1) -> 영역을 점으로 변환
- 그 외 활성함수는 부드러운 의사결정 -> 영역을 영역으로 변환
- 대표적인 비선형 함수인 S자 모양의 sigmoid를 활성함수로 사용
- 이진 시그모이드 함수, 양극 시그모이드 함수
- 활성 함수에 따른 다층 퍼셉트론의 공간 분할 능력 변화(+1과 -1로 나눠지는 부분, 즉 구간이 조정이 될 수 있다.)
- 신경망이 사용하는 다양한 활성함수
- logistic sigmoid와 tanh는 a가 커질수록 계단함수에 가까워짐
- 모두 1차 도함수 계산이 빠름(특히, ReLU는 비교 연산 한 번)
- 활성함수로 사용되는 여러 함수
- 계단함수 : 퍼셉트론(-1과1 사이로 매핑)
- 로지스틱 시그모이드 : 이진 시그모이드, 다층 퍼셉트론(0과 1사이로 매핑)
- 하이퍼볼릭 탄젠트 : 양극 시그모이드, 다층 퍼셉트론(-1과 1사이로 매핑)
- 소프트플러스(0과 무한대 사이로 매핑)
- 렉티파이어(ReLU) : 심층학습(0과 무한대 사이로 매핑)
- 활성함수로 사용되는 여러 함수
- 활용 예
- 퍼셉트론은 계단함수
- 다층 퍼셉트론은 logistic sigmoid와 tanh
- 심층학습은 ReLU
- 일반적으로 은닉층에서 logistic sigmoid를 활성 함수로 많이 사용(0~1사이 값으로 매핑시킴)
- S자 모양의 넓은 포화곡선*은 경사도 기반 학습(오류 역전파)을 어렵게 함 -> 깊은 신경망에서는 ReLU 활용.
- S자 모양의 넓은 포화곡선*은 경사도 기반 학습(오류 역전파)을 어렵게 함 -> 깊은 신경망에서는 ReLU 활용.
구조
- 입력-은닉층-출력의 2층 구조의 경우
- d+1개의 입력 노드(d는 특징의 개수). c개의 출력 노드(c는 분류 개수)
- p개의 은닉 노드 : p는 하이퍼 매개변수(사용자가 정해주는 매개변수)
- p가 너무 크면 과잉적합, 너무 작으면 과소적합 -> 5.5절의 하이퍼 매개변수 최적화
- (2층 구조의 경우) 다층 퍼셉트론의 매개변수(가중치)
- 입력-은닉층을 연결하는 $U^1$
- 은닉층-출력을 연결하는 $U^2$
- 일반화하면 $u^1_{ji}$은 $l-1$번째 은닉층의 $i$번째 노드를 $l$번째 은닉층의 $j$번째 노드와 연결하는 가중치
- 입력을 0번째 은닉층, 출력을 마지막 은닉층으로 간주
- 입력을 0번째 은닉층, 출력을 마지막 은닉층으로 간주
동작
- 특징벡터 x를 출력벡터 o로 사상(mapping)하는 함수로 간주할 수 있음
- 예 : 2층 퍼셉트론 : $o = f(x) = f_2(f_1(x))$
- 깊은신경망은 층, 즉 레이어가 4개 이상인 것
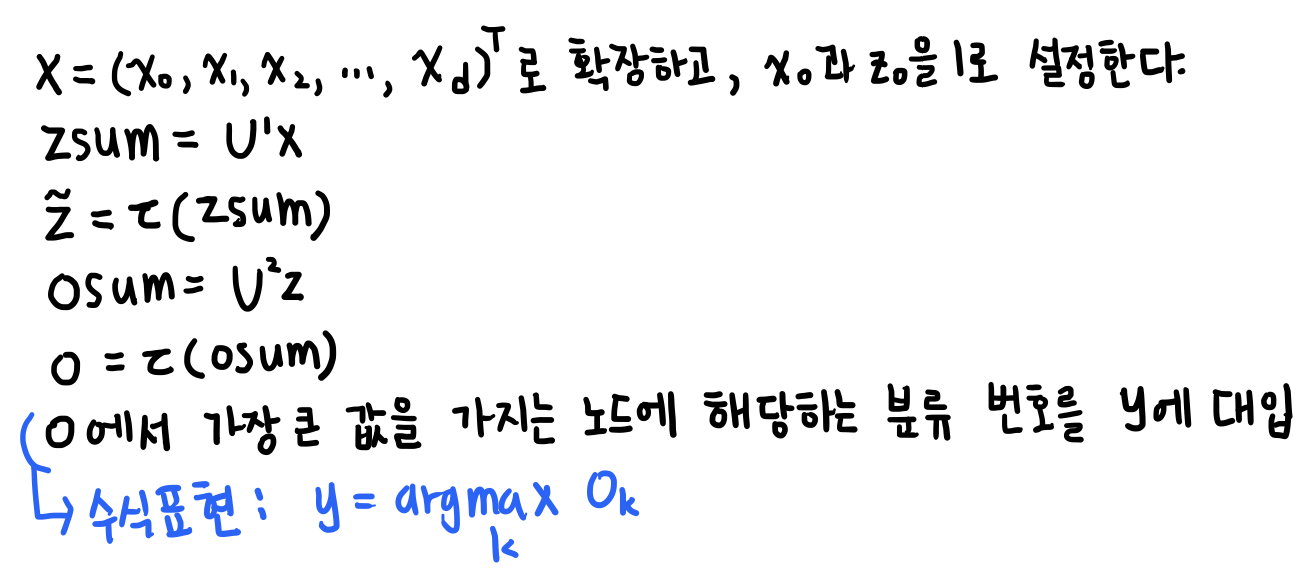
- 노드가 수행하는 연산을 구체적으로 쓰면,
- j번째 은닉 노드의 연산 : $z_j = \tau(zsum_j)$, $zsum_j = u_j^1x$
- $u_j^1$은 j번째 은닉 노드에 연결된 가중치 벡터
- k번째 출력 노드의 연산 : $o_k = \tau(osum_k)$, $osum_k = u_k^2z$
- $u_k^2$는 k번째 출력 노드에 연결된 가중치 벡터
- j번째 은닉 노드의 연산 : $z_j = \tau(zsum_j)$, $zsum_j = u_j^1x$
-
다층 퍼셉트론의 동작을 행렬로 표기하면, $o = \tau(U^2\tau_h(U^1x))$
- 은닉층은 특징 추출기
- 은닉층은 특징 벡터를 분류에 더 유리한 새로운 특징 공간으로 변환
- 현대 기계학습에서는 특징학습이라 부름(심층학습은 더 많은 층을 거쳐 계층화 된 특징학습을 함)
구조
- 기본 구조
- 범용적 근사 이론
- 하나의 은닉층은 함수의 근사를 표현 -> 다층 퍼셉트론도 공간을 변환하는 근사 함수
- 얕은 은닉층의 구조
- 지수적으로 더 넓은 폭이 필요할 수 있음
- 더 과잉적합 되기 쉬움
- 일반적으로 얕고 넓은 폭의 은닉층 구조보다 깊은 은닉층의 구조가 좋은 성능을 가짐
- 범용적 근사 이론
- 은닉층의 깊이에 따른 이점
- 지수의 표현
- 원공간이 종이 한장이라고 생각했을 때, 이 종이를 접고 접어서 원공간에서는 직선으로 분류할 수 없는 것을 종이를 여러번 접음에 따라(은닉층이 깊어짐에 따라) 선형으로 간단하게 분류할 수 있다.
- 각 은닉층은 입력 공간을 어디서 접을지 지정 -> 지수적으로 많은 선형적인 영역 조각들
- 성능 향상
- 지수의 표현
다층 퍼셉트론에 의한 인식
- 다층 퍼셉트론 학습 과정
- 예측 단계
- 학습을 마친 후 현장 설치하여 사용(또는 테스트 집합으로 성능 테스트)
- 입력 : 테스트 샘플 x
- 출력 : 부류 y
- 전방 계산 한번만 사용하므로 빠름
- 다층 퍼셉트론 시각화 : https://playground.tensorflow.org
오류 역전파 알고리즘의 빠른 속도
- 연산 복잡도 비교
- 오류 역전파 : 전방 계산 대비 약 1.5~2배의 시간 소요 <- 비교적 빠름(연쇄법칙)
- c: 분류 수, d: 특징 차원, p: 은닉층 차원
- 학습 알고리즘은 오류 역전파 반복하여 점근적 시간복잡도는 $\Theta((cp+dp)np)$
- n: 훈련집합의 크기, q: epoch 수
- n: 훈련집합의 크기, q: epoch 수
- 오류 역전파 : 전방 계산 대비 약 1.5~2배의 시간 소요 <- 비교적 빠름(연쇄법칙)
모든 함수를 정확하게 근사할 수 있는 능력
- 은닉 노드가 충분히 많다면, 활성함수로 무엇을 사용하든 표준 다층 퍼셉트론은 어떤 함수라도 원하는 정확도만큼 근사화할 수 있다.
성능 향상을 위한 경험의 중요성
- 순수한 최적화 알고리즘으로는 높은 성능 불가능
- 데이터 희소성, 잡음, 미숙한 신경망 구조 등 때문에!
- 성능 향상을 위한 다양한 경험을 개발하고 공유해야함.
- 신경망의 경험적 개발에서 주요 쟁점
- 아키텍처 : 은닉층과 은닉 노드의 개수 정하기
- 초깃값 : 가중치 초기화할때 난수이지만 그 값의 범위와 분포가 중요
- 학습률 : 처음에는 큰 값->점점 줄이기
- 활성함수 : 초창기 다층 퍼셉트론은 로지스틱 시그모이드 -> 깊은 신경망에서는 주로 ReLU사용
오류 역전파 알고리즘
순방향 전파로 w_1, w_2를 통해서 나온 예측값과 실제값의 차이를 줄이기 위해 각각의 w_1, w_2를 경사하강법을 취해 목적함수 J(w)를 가중치로 편미분하여 최소화한다.
즉 w_2에서 들어오는 오차가 w_1에 영향을 미치게 되는데 이게 back propagation이다.
역전파 방법은 결과 값을 통해서 다시 역으로 input 방향으로 오차를 다시 보내며 가중치를 재업데이트 하는 것이다. 물론 결과에 영향을 많이 미친 노드(뉴런)에 더 많은 오차를 돌려줄 것이다.
목적함수의 정의
- 훈련집합
- 특징 벡터 집합 $X$, $Y$
- 분류 벡터는 one-hot코드로 표현됨. 즉 $y_i = (0,0,…,1,…,0)^T$
- 기계학습의 목표
- 모든 샘플을 옳게 분류하는 함수 f를 찾는 일
- 목적함수
- 가장 많이 쓰이는 평균 제곱 오차(MSE)
- L2 norm 사용
- 온라인 모드 : 배치모드를 스트리밍으로 하는 것.
- 배치 모드 : 데이터셋을 특정 단위 n개만큼 보는 것.
- 가장 많이 쓰이는 평균 제곱 오차(MSE)
오류 역전파를 이용한 학습 알고리즘
- 연산그래프(전방 연산을 그래프로 표현할 수 있음)
- 연쇄 법칙(chain rule)의 구현
- 반복되는 부분식들을 저장하거나 재연산을 최소화(예: 동적 프로그래밍)
- 그래디언트를 구할 때 신경망에서 연속해서 일어나는 연쇄법칙을 오류역전파할때 활용한다.
- ${\partial E \above 1pt \partial w_{ij}} = {\partial E \above 1pt \partial o_j}{\partial o_j \above 1pt \partial net_j}{\partial net_j \above 1pt \partial w_ij}$
- 체인룰(연쇄법칙)을 통해 끝에서부터 나오는 오류(손실함수)를 내가 원하는 위치까지 보낼 수 있다.
- 목적함수를 다시 쓰면, $J(\Theta) = {1 \above 1pt 2}\left | y - o(\Theta) \right |_{2}^{2}$(2층 퍼셉트론의 경우 $\Theta = {U^1, U^2}$)
- 이 목적함수의 최저점을 찾아주는 경사하강법(2층 퍼셉트론의 경우)
- $U^1 = U^1 - \rho {\partial J \above 1pt \partial U^1}$
- U^2 = U^2 - \rho {\partial J \above 1pt \partial U^2}
- $X -> U^1_ -> U^2 -> J(\Theta)$으로 연산이 순차적으로 진행된다.
- 이걸 역으로 미분하여 체인룰을 통해 오류역전파를 사용하여 내가 원하는 위치의 것을 활용할 수 있다.
- 오류 역전파 알고리즘
- 출력의 오류를 역방향(오른쪽에서 왼쪽으로)으로 전파하며 경사도를 계산하는 알고리즘
- 반복되는 부분식들의 경사도의 지수적 폭발(exponential explosion) 혹은 사라짐(vanishing)을 피해야함.
- [경사도 단순화] 역전파 분해(backprop with scalars)
x, y, z가 서로 스칼라라고 하자. 두 입력이 들어와서 처리를 해서 내보내는 것을 생각해보자.
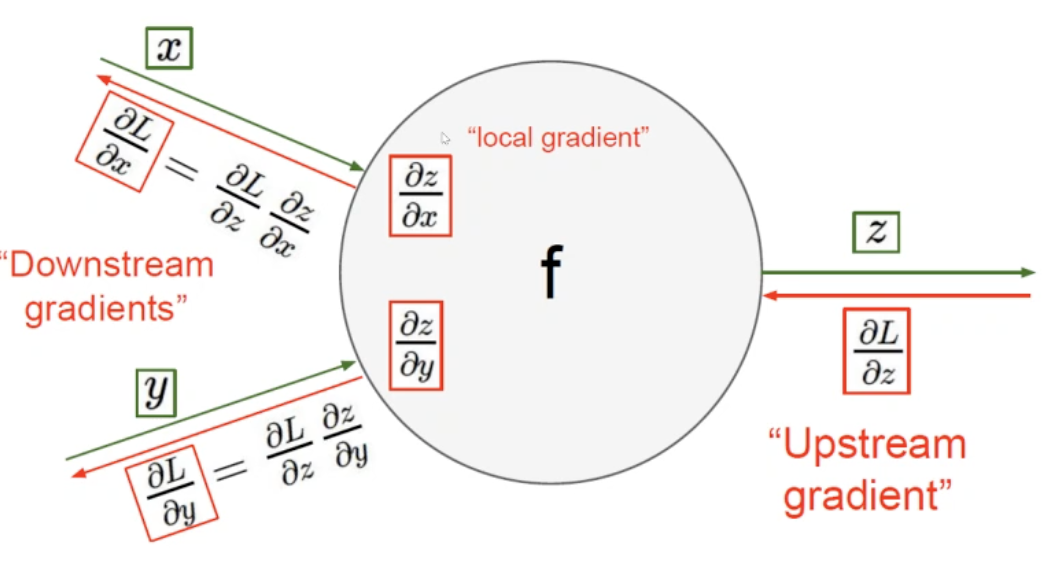
L은 loss(z-실제값),이것을 내가 원하는 위치(가중치)의 미분을 구한다. z에서 구하고 싶으면 L을 z에 대해 미분하고, x에서 구하고 싶으면 L을 z에 대해 미분한 것 * z를 x에 대해 미분한 것(체인룰!) Downstream gradient는 연산을 통과시키기 이전에 있었던 값이다. - 단일 노드역전파
- in -> f(함수) -> out 의 forward구조일 때
- ${\partial \varepsilon \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot {\partial out \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot f’(in)$
- 덧셈의 역전파의 예
- in 여러개 -> $\Sum$ -> out의 forward 구조일 때
- ${\partial \varepsilon \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot {\partial out \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot 1$
- S자 모양 활성함수의 역전파 예
- in -> 활성함수 -> out의 forward 구조일 때
- ${\partial \varepsilon \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot {\partial out \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot \sigma’(in) = {\partial \varepsilon \above 1pt \partial out}\cdot [\sigma(in)(1-\sigma(in))]$
- 최대화의 역전파 예
- ${\partial \varepsilon \above 1pt \partial in} = {\partial \varepsilon \above 1pt \partial out}\cdot {\partial out \above 1pt \partial in}$
- 결과
- ${\partial \varepsilon \above 1pt \partial out}$(if in_i is max)
- 0(otherwise)
-
fanout(forward) <=> sum(backprop)
- 도함수의 종류
- Scalar to Scalar : regular derivative
- Vector to Scalar(편미분) : Derivative is Gradient
- Vector to Vector : Derivative is Jacobian
- 오류 역전파 미분의 연쇄 법칙이용
- 연쇄 법칙
- 스칼라인 경우, ${dz \above 1pt dx} = {dz \above 1pt dy}{dy \above 1pt dx}$
- 벡터인 경우, $\bigtriangledown_x^z = ({\partial y \above 1pt \partial x})^T \triangledown_y^z$
- x가 m차원 -> y가 n차원 -> 결과가 스칼라 인 경우로 forward인 구조인 경우!
- 야코비안 행렬과 경사도를 곱한 연쇄 법칙을 얻어서 구함. (야코비안과 그래디언트의 곱)
- 연쇄 법칙
- 행렬 표기 : GPU를 사용한 고속 행렬 연산에 적합. 스칼라, 벡터보다 행렬이 좋다! GPU 연산을 할 수 있게끔 미니배치로 행렬을 만든다.
미니배치 확률론적 경사 하강법
- 미니배치 방식
- 미니배치(텐서 버전)
- 한번에 t개의 샘플을 처리(t = 미니배치 크기)
- t=1이면 확률론적 경사 하강법
- t=n(전체)이면 배치 경사 하강법
- 경사도의 잡음을 줄여주는 효과 때문에 수렴이 빨라짐
- GPU를 사용한 병렬처리에도 유리함
- 현대 기계 학습은 미니배치 기반의 확률론적 경사 하강법을 표준처럼 여겨 널리 사용함.
실습
Pytorch Tutorial - Autograd & MLP(Multi-layer perceptron)
Autograd
- autograd 패키지는 텐서의 모든 연산에 대한 자동 미분을 제공
- 실행-기반-정의(define-by-run) 프레임워크로, 코드를 어떻게 작성하여 실행하느냐에 따라 역전파가 정의된다는 것을 의미
- 역전파는 학습 과정의 매 단계마다 달라짐
Tensor
- torch, Tensor 클래스의 .requires_grad 속성을 True로 설정하면, 해당 텐서에서 이루어진 모든 연산을 추적(track)하기 시작
- 계산이 완료된 후, backward()를 호출하여 모든 변화도(gradient)를 자동으로 계산할 수 있으며 이 Tensor의 변화도는 .grad 속성에 누적됨
- Tensor가 기록을 추적하는 것을 중단하게 하려면, .detach()를 호출하여 연산기록으로부터 분리하여 연산이 추적되는 것을 방지할 수 있음
- 기록을 추적하는 것(과 메모리를 사용하는 것)을 방지하기 위해서 코드 블럭을 with torch.no_grad():로 감쌀 수 있음
- 이는 변화도(gradient)는 필요 없지만 requires_grad=True가 설정되어 학습 가능한 매개변수를 갖는 모델을 평가(evaluate)할 때 유용
- Autograd 구현에서 Function 클래스는 매우 중요한 역할을 수행
- Tensor와 Function은 서로 연결되어 있고 모든 연산 과정을 부호화하여 순환하지 않는 그래프를 생성
- 각 tensor는 .grad_fn 속성을 가지고 있는데 이는 Tensor를 생성한 Function을 참조함(단, 사용자가 만든 Tensor는 예외이며, 사용자가 만든 Tensor가 아닌 연산에 의해 생긴 텐서와 같은 경우는 모두 Function을 참조)
- 도함수를 계산하기 위해서는 Tensor의 .backward()를 호출하면 됨
ANN(Artificial Nequral Networks)
- 신경망은 torch.nn 패키지를 사용하여 생성할 수 있음
- nn은 모델ㅇ르 정의하고 미분하기 위해서 위에서 살펴본 autograd를 사용
- nn.Module은 계층(layer)과 output을 반환하는 forward(input) 메소드를 포함
- 간단한 순전파 네트워크(feed-forward-network)
- 입력을 받아 여러 계층에 차례로 전달한 후, 최종 출력을 제공
- 신경망의 일반적인 학습 과정
- 학습 가능한 매개변수(가중치)를 갖는 신경망을 정의
- 데이터 셋 입력을 반복
- 입력을 신경망에서 전파(프로세스)
- 손실(loss; 입력 값과 예측 값과의 차이)를 계산
- 변화도(gradient)를 신경망의 매개변수들에 역으로 전파 - 역전파 과정
- 신경망의 가중치를 갱신
- 새로운 가중치(weight) = 가중치(weight) - 학습률(learning rate) * 변화도(gradient)
손실함수(Loss Function)
- 손실함수는 (output, target)을 한 쌍으로 입력받아, 출력이 정답으로부터 얼마나 떨어져 있는지 추정하는 값을 계산
- forward 함수만 정의하고 나면 backward함수는 autograd를 사용하여 자동으로 정의됨
- 모델의 학습 가능한 매개 변수는 net.parameters()에 의해 변환됨
가중치 갱신
- 가장 단순한 갱신 규칙은 확률적 경사하강법(SGD)
- 새로운 가중치(weight) = 가중치(weight) - 학습률(learning rate) * 변화도(gradient)
TensorFlow Tutorial
자동 미분과 그래디언트 테이프
그레디언트 테이프
- 텐서플로는 자동미분을 위한 tf.GradientTape API를 제공
- tf.GradientTape는 컨텍스트 안에서 실행된 모든 연산을 테이프에 ‘기록’
- 후진 방식 자동 미분(reverse mode differetiation)을 사용해서 테이프에 ‘기록된’ 연산 그래디언트를 계산
제어 흐름 기록
- 연산이 실행되는 순서대로 테이프에 기록되기 때문에, 파이썬 제어흐름이 자연스럽게 처리됨
- 연산이 파이썬과 동일한 순서대로 돌아간다.
고계도(Highter-order) 그래디언트
- GradientTape 컨텍스트 메이저 안에 있는 연산들은 자동미분을 위해 기록됨
- 만약 이 컨텍스트 안에서 그래디언트를 계산하면 해당 그래디언트 연산 또한 기록됨
ANN
Sequencial 모델을 사용하는 경우
- Sequencial 모델은 각 레이어에 정확히 하나의 입력 텐서와 하나의 출력 텐서가 있는 일반 레이어 스택에 적합
오늘 한 부분 어려웠다! 이론 강의 부분 시간날때 한번 더 보기!