
[Mindstorms EV3]LineTrace 로봇 프로그래밍:U자형 커브
Goal
- Follow the straight line
- Follow the S-shaped (curved) line
- Stop at the GREEN block for 3 seconds
- Stop/Finish at the RED block
- Vehicle must make ‘beep’ sound both at the beginning and the end
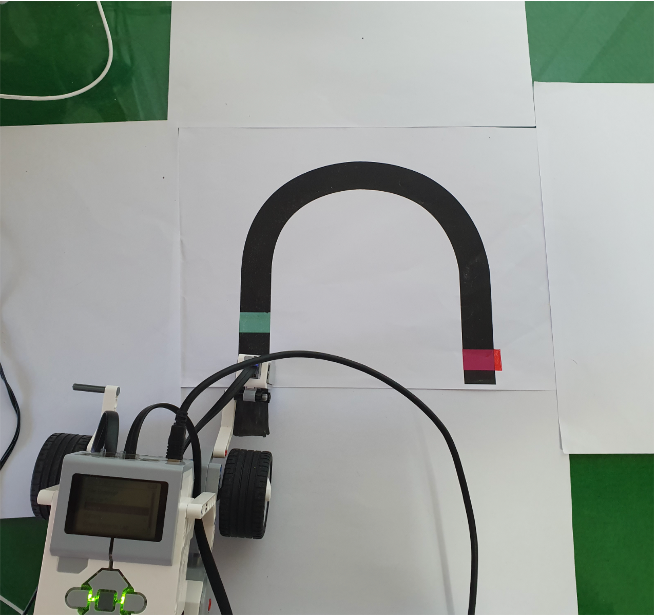
맵과 로봇 사진
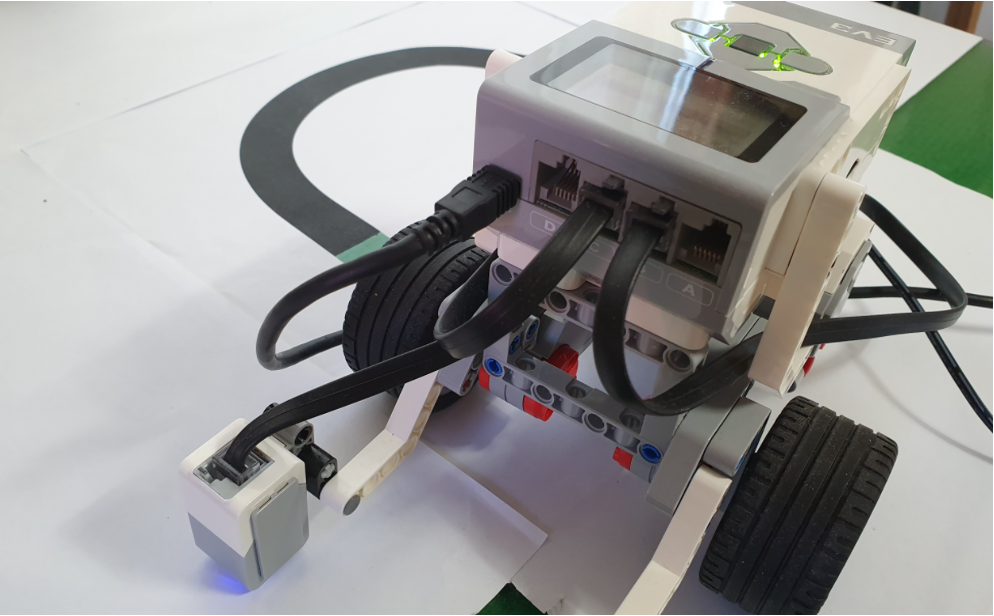
하드웨어
- Mindstorms EV3 메뉴얼의 기본 로봇 구조
- 컬러 감지 센서 한개
- 모터 두개
- 바퀴 두개
소프트웨어
import ev3dev.ev3 as ev3
from ev3dev2.sound import Sound
from ev3dev2.sensor.lego import ColorSensor
from time import sleep
#sensor
cs = ev3.ColorSensor()
#so = Sound()
#so.beep()
speed = 100
rm = ev3.LargeMotor('outC')
lm = ev3.LargeMotor('outB')
greenflag=0
while(True):
try:
cs = ev3.ColorSensor()
if(cs.color == 1): #if color is black
rm.run_to_rel_pos(position_sp=1080, speed_sp=speed)
lm.run_to_rel_pos(position_sp=1080, speed_sp=speed)
elif(cs.color == 3 and greenflag==0): #if color is green
#sleep(3)
print("it is green")
greenflag = 1
rm.stop()
lm.stop()
sleep(3)
rm.run_to_rel_pos(position_sp=1080, speed_sp=speed)
lm.run_to_rel_pos(position_sp=1080, speed_sp=speed)
elif(cs.color == 5): #if color is red
rm.stop()
lm.stop()
so = Sound()
so.beep()
break
elif(cs.color == 6): #if color is white
rm.run_to_rel_pos(position_sp=1080, speed_sp=speed)
lm.run_to_rel_pos(position_sp=1080, speed_sp=speed+375)
except:
#print(e)
rm.stop()
lm.stop()
break
알고리즘
- 센서가 검은색을 감지하면
- 두 모터의 속도를 동일하게 하여 직진한다.
- 센서가 초록색을 감지하고 greenflag가 0이면
- greenflag를 1로 바꿔서 초록색이 한번만 인지되게 한다.
- 3초동안 sleep하여 모터를 멈춘다.
- 3초 이후 다시 두 모터의 속도를 동일하게 하여 직진한다.
- 센서가 하얀색을 감지하면
- 왼쪽 모터의 스피드를 올려 로봇이 커브를 크게 오른쪽으로 돌게 한다.
- 센서가 빨간색을 감지하면
- 부저가 울리고 두 모터를 정지시킨다.
- 부저가 울리고 두 모터를 정지시킨다.
실험적인 결과로 얻은 적절한 모터값
| Situation | Left Motor | Right Motor |
|---|---|---|
| Initial value | 100 | 100 |
| White color detected | 475 | 100 |
| Black color detected | 100 | 100 |
| Green color detected | 0 | 0 |
| Red color detected | 0 | 0 |
겪었던 문제점
- 컬러 센서가 색을 잘 감지하지 못한다.
- 이를 해결하기 위해 컬러 센서가 지면과 가까워지도록 레고를 조립했다.
- 첫번째 문제를 해결하자 발생한 문제이다. 센서가 초록색을 계속 인식해서 계속 sleep(3)을 유발한다.
- 이 문제는 플래그를 사용하여 초록색을 한번만 인지하도록 했다. 플래그가 0일 때만 sleep(3)을 하며, 이후 플래그를 1로 바꿔 다시 초록색이 인지 되어도 모터를 움직일 수 있도록 한다.
- 커브가 심한 곳에서 모터가 잘 움직이지 않는다.
- 실험적으로 두 모터의 속도 차이를 크게 벌리는 적절한 값을 찾아 해결했다. 기본 속도 100에 커브에서 375를 더해주면 깔끔하게 움직인다.