
[Mindstorms EV3]Maze Runner 로봇 프로그래밍
Goal
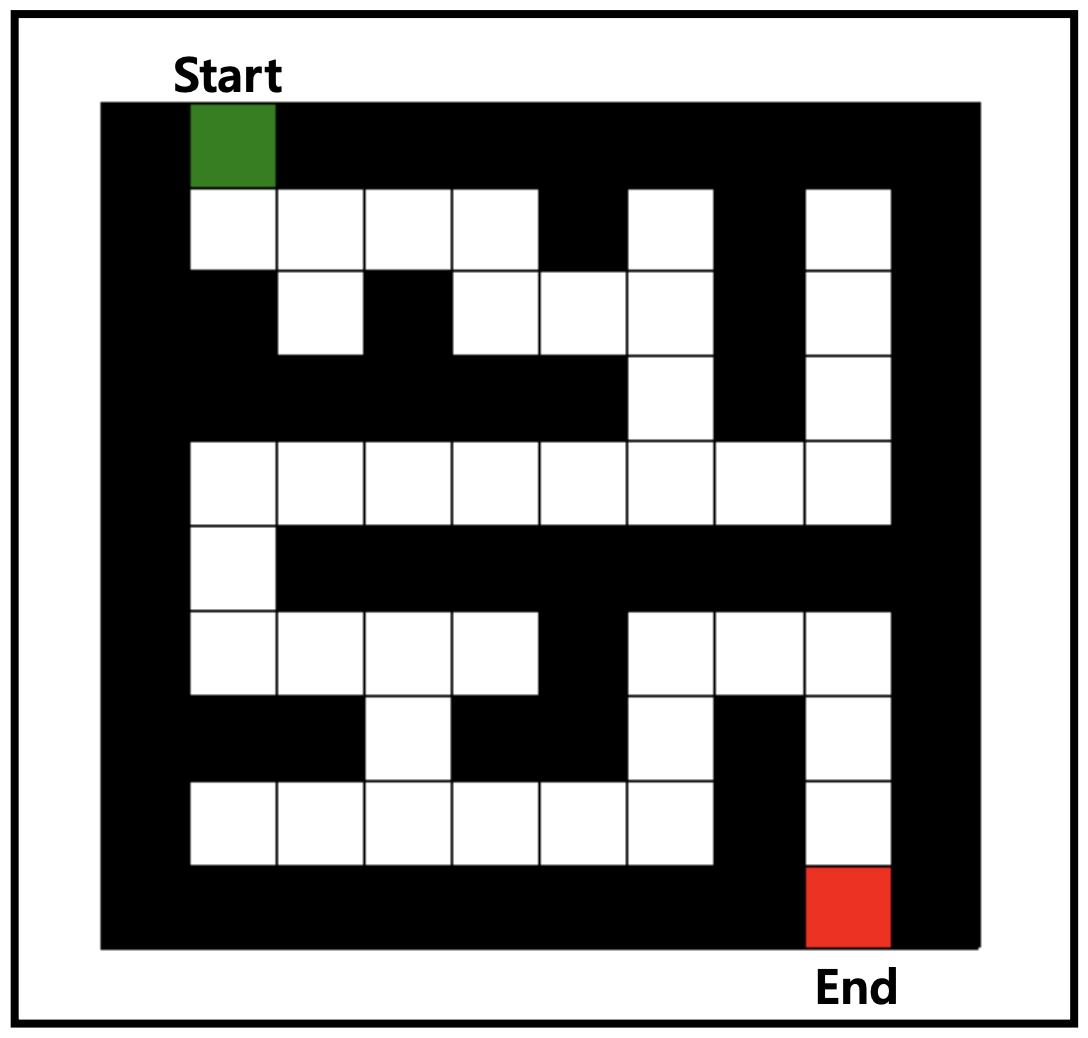
Design both HW and SW to find the shortest route on a given map
Requirements
- Scan/read the map
- Algorithm (find the route)
- Move along the path
- Competition: Shortest path
Machine must make a ‘beep’ sound both at the beginning and end
-> we measure the run time according to the beep sound
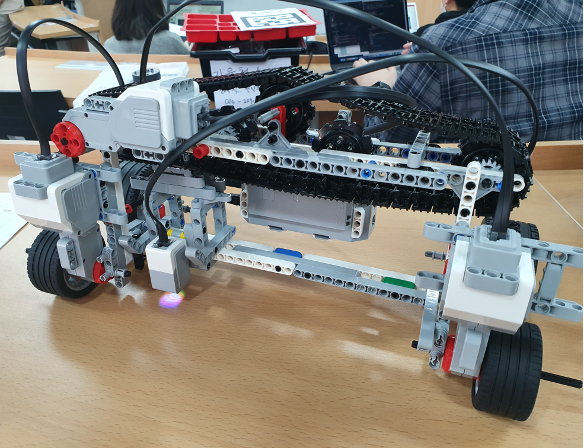
맵과 로봇 사진
소프트웨어
import ev3dev.ev3 as ev3
from ev3dev2.sound import Sound
from ev3dev2.sensor.lego import ColorSensor
from time import sleep
import queue
cs = ev3.ColorSensor(ev3.INPUT_1)
cs_m = ev3.LargeMotor('outC')
bike_m_l = ev3.LargeMotor('outD')
bike_m_r = ev3.LargeMotor('outB')
#map scan
map = [[-1]*10 for _ in range(10)] #10*10 matrix
speed = 56 #initial speed_sp
#speedup = 190 #when sensor switch direction
#speedup2 = 117 #after ith row speed
sp = 55 #initial position_sp
num = 1 #for print
iter = 0 #for count column
#find path
N = 10 # x lenght
M = 10 # y lengh
#strt_x = 0 #green x
#strt_y = 1 #green y
#dst_x = 9 #red x
#dst_y = 5 #red y
dir = [[1, 0], [0, 1], [-1, 0], [0, -1]]
flag = False
#calculate the shortest distance value
def weight():
# 1:can go / 0:can not go
q = queue.Queue()
check = [[-1]*10 for _ in range(10)]
check[strt_x][strt_y] = 1
q.put((strt_x,strt_y))
#start bfs
while (q.qsize() != 0):
x = q.queue[0][0]
y = q.queue[0][1]
q.get()
for i in range(4):
xx = x + dir[i][0]
yy = y + dir[i][1]
if(xx < 0 or xx >= N or yy < 0 or yy >= M):
continue
if(map[xx][yy] == 0 or check[xx][yy] != -1):
continue
check[xx][yy] = check[x][y]+1
q.put((xx, yy))
return check
#order list for destination
def MakeOrder(check):
stack=[]
order=[]
check[strt_x][strt_y] = 1
stack.append((strt_x, strt_y))
do_nothing = False
while(len(stack) != 0):
x = stack[-1][0]
y = stack[-1][1]
p = stack.pop()
if(do_nothing):
boundary_answer = check[p[0]][p[1]]
boundary = order.pop()
while(check[boundary[0]][boundary[1]] > boundary_answer):
boundary = order.pop()
order.append(p)
do_nothing = True
#start dfs
for i in range(4):
xx = x + dir[i][0]
yy = y + dir[i][1]
if (xx < 0 or xx >= N or yy < 0 or yy >= M):
continue
if (check[xx][yy] == -1):
continue
if(check[xx][yy] == check[x][y] + 1):
if(check[xx][yy] == check[dst_x][dst_y] and xx != dst_x and yy != dst_y):
continue
if((xx,yy) == (dst_x, dst_y)):
order.append((xx,yy))
return order
stack.append((xx,yy))
do_nothing = False
return order
try:
#map scan
for i in range (10):
while(iter<9):
if(cs.color == 1):
print(num,":",cs.color,"black")
if i%2 == 0 :
map[i][iter] = 0
elif i%2 == 1 :
map[i][-iter+9] = 0
if iter == 0:
speed = speed+7
if i >= 5:
if iter == 0:
speed = speed+8
else:
speed = speed+1
if flag == False:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
sleep(3)
elif flag == True:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
sleep(3)
cs_m.stop()
iter += 1
speed = 60
elif(cs.color == 3 and 80 <= cs.green <= 150 and cs.red<=80):
print(num,":",cs.color,"green")
if i%2 == 0 :
map[i][iter] = 3
elif i%2 == 1 :
map[i][-iter+9] = 3
if iter == 0:
speed = speed+7
if i >= 5:
if iter == 0:
speed = speed+8
else:
speed = speed+1
if flag == False:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
sleep(3)
elif flag == True:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
sleep(3)
cs_m.stop()
iter += 1
speed = 60
elif(cs.color == 5):
print(num,":",cs.color,"red")
if i%2 == 0 :
map[i][iter] = 5
elif i%2 == 1 :
map[i][-iter+9] = 5
if iter == 0:
speed = speed+7
if i >= 5:
if iter == 0:
speed = speed+8
else:
speed = speed+1
if flag == False:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
sleep(3)
elif flag == True:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
sleep(3)
cs_m.stop()
iter += 1
speed = 60
else:
print(num,":",cs.color,"white")
if i%2 == 0 :
map[i][iter] = 1
elif i%2 == 1:
map[i][-iter+9] = 1
if iter == 0:
speed = speed+7
if i >= 5:
if iter == 0:
speed = speed+8
else:
speed = speed+1
if flag == False:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
sleep(3)
elif flag == True:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
sleep(3)
cs_m.stop()
iter += 1
speed = 60
print(num,":",cs.color)
if cs.color == 1:#black
if i%2==0:
map[i][9] = 0
elif i%2==1:
map[i][0] = 0
elif (cs.color == 3 and 80 <= cs.green <= 150 and cs.red <= 80):#green
if i%2==0:
map[i][9] = 3
elif i%2==1:
map[i][0] = 3
elif cs.color == 5:#red
if i%2==0:
map[i][9] = 5
elif i%2==1:
map[i][0] = 5
else:#white
if i%2==0:
map[i][9] = 1
elif i%2==1:
map[i][0] = 1
num+=1
iter=0
if i == 9:
break
bike_m_l.run_to_rel_pos(position_sp=37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=37, speed_sp=30)
sleep(3)
bike_m_l.stop()
bike_m_r.stop()
flag = not flag
print("==============================")
#if i>= 4:
# bike_m_l.run_to_rel_pos(position_sp=3600, speed_sp=200)
# bike_m_r.run_to_rel_pos(position_sp=3600, speed_sp=200)
bike_m_l.run_to_rel_pos(position_sp=-3600, speed_sp=110)
bike_m_r.run_to_rel_pos(position_sp=-3600, speed_sp=110)
sleep(3)
bike_m_l.stop()
bike_m_r.stop()
print("scanned map")
for i in range(N):
for j in range(M):
print('{0:^2d}'.format(map[i][j]), end=",")
print()
for i in range(10):
for j in range(10):
if map[i][j] == 3:#green
strt_x = i
strt_y = j
if map[i][j] == 5:#red
dst_x = i
dst_y = j
#find shortest path
check = weight()
OrderList = MakeOrder(check)
print("shortest path map")
for i in range(N):
for j in range(M):
print('{0:^2d}'.format(check[i][j]), end=",")
print()
print("order list")
print(OrderList)
#follow the shortest path
so = Sound()
x = 0
y = 0
sleep(3)
while(x != OrderList[0][0] or y != OrderList[0][1]):
if OrderList[0][0] > x :
bike_m_l.run_to_rel_pos(position_sp=37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=37, speed_sp=31)
sleep(2)
x+=1
continue
if OrderList[0][0] < x:
bike_m_l.run_to_rel_pos(position_sp=-37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=-37, speed_sp=31)
sleep(2)
x-=1
continue
if OrderList[0][1] > y:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
sleep(2)
y+=1
continue
if OrderList[0][1] < y:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
sleep(2)
y-=1
continue
sleep(3)
so.beep()
#for i in range(len(OrderList)+1):
i=0
while (dst_x != x or dst_y != y) :
print(i, "th step", x, y)
if (dst_x == x and dst_y == y):
break
if OrderList[i][0] > x :
if i==0:
bike_m_l.run_to_rel_pos(position_sp=37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=37, speed_sp=31)
else:
bike_m_l.run_to_rel_pos(position_sp=37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=37, speed_sp=31)
sleep(2)
x+=1
if OrderList[i][0] < x :
if i==0:
bike_m_l.run_to_rel_pos(position_sp=-37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=-37, speed_sp=31)
else:
bike_m_l.run_to_rel_pos(position_sp=-37, speed_sp=30)
bike_m_r.run_to_rel_pos(position_sp=-37, speed_sp=31)
sleep(2)
x-=1
if OrderList[i][1] > y :
if i==0:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
else:
cs_m.run_to_rel_pos(position_sp=sp, speed_sp=speed)
sleep(2)
y+=1
if OrderList[i][1] < y :
if i==0:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
else:
cs_m.run_to_rel_pos(position_sp=-sp, speed_sp=speed)
sleep(2)
y-=1
i+=1
except:
cs_m.stop()
bike_m_l.stop()
bike_m_r.stop()
so = Sound()
so.beep()
알고리즘
겪었던 문제점
- 컬러 센서가 불규칙하게 흔들리면서 이동한다.
- 컬러 센서에 사각형의 레고를 부착하고 사각형의 구멍을 통과하는 다리를 만들어 컬러 센서가 흔들리지 않고 움직이게 함.
- 컬러 센서가 1.7cm씩 간격을 따라 이동하지 않는다.
- 실험적으로 1.7cm를 움직이기 위한 라지모터의 속도와 position_sp 즉 모터가 돌아가는 각도 값을 구해 적용함.
- 부속품이 많아 모터의 움직임이 둔화된다.
- 모터 체인이 늘어지지 않도록 삼각형 모양으로 톱니바퀴를 배치해 팽팽하게 만듦.
- 각 톱니바퀴에 부착되어있는 부속품을 최대화하여 마찰을 최소화함.
- 로봇이 직진하지 못하고 계속 좌측으로 회전함. 모터값에 따라 일정하게 움직이지 않음.
- 로봇의 무게중심이 완전히 맞지 않기 때문. 라지모터를 두개 사용하여 왼쪽 바퀴와 오른쪽 바퀴의 속도를 각각 조절할 수 있게 함.
- 회전하는 쪽에 따라 속도를 다르게 하여 직진할 수 있게 함.
- 시간에 따라 움직이는 게 아닌 바퀴의 회전 각도 값에 따라 움직이게 함.
- 초록색이 제대로 인식되지 않음
- PBL01때와 마찬가지로 green값의 RGB범위를 측정하여 인식하게 함.
- 지면과 컬러 센서의 위치를 알맞게 조정해줌.
- 빨간색과 초록색이 맵의 어느 위치에 있을지 모름
- 컬러센서가 맵을 다 읽고 난 뒤 우선 맵의 (0, 0)위치로 이동하게 함
- 컬러 값이 저장된 맵에서 빨간색과 초록색이 존재하는지 확인함. 확인이 되었다면 초록색의 좌표를 향해 x, y축을 조정하여 이동한 후 최적 경로에 따라 움직이기 시작함.